Control is one of the central principles underlying any feat of engineering. By harnessing and controlling the laws of nature, engineers not only shape the world to their will, they ensure that the products of their imagination behave predictably and for the greater good.
That beautiful idea certainly motivated Micah Angelo Bacani, an alumnus of the Electrical and Electronics Engineering Institute, University of the Philippines Diliman. As an undergraduate, he had already been fascinated by control systems, frameworks that ensure machines respond intelligently to input and adjust themselves towards a goal. Bacani dreamed of being a space engineer, applying his knowledge to help Filipinos make their mark in the great unknown.
There was only one problem: the world was locked down by the COVID-19 pandemic then, and Bacani, a senior, needed a project he could work on mostly remotely in order to graduate.
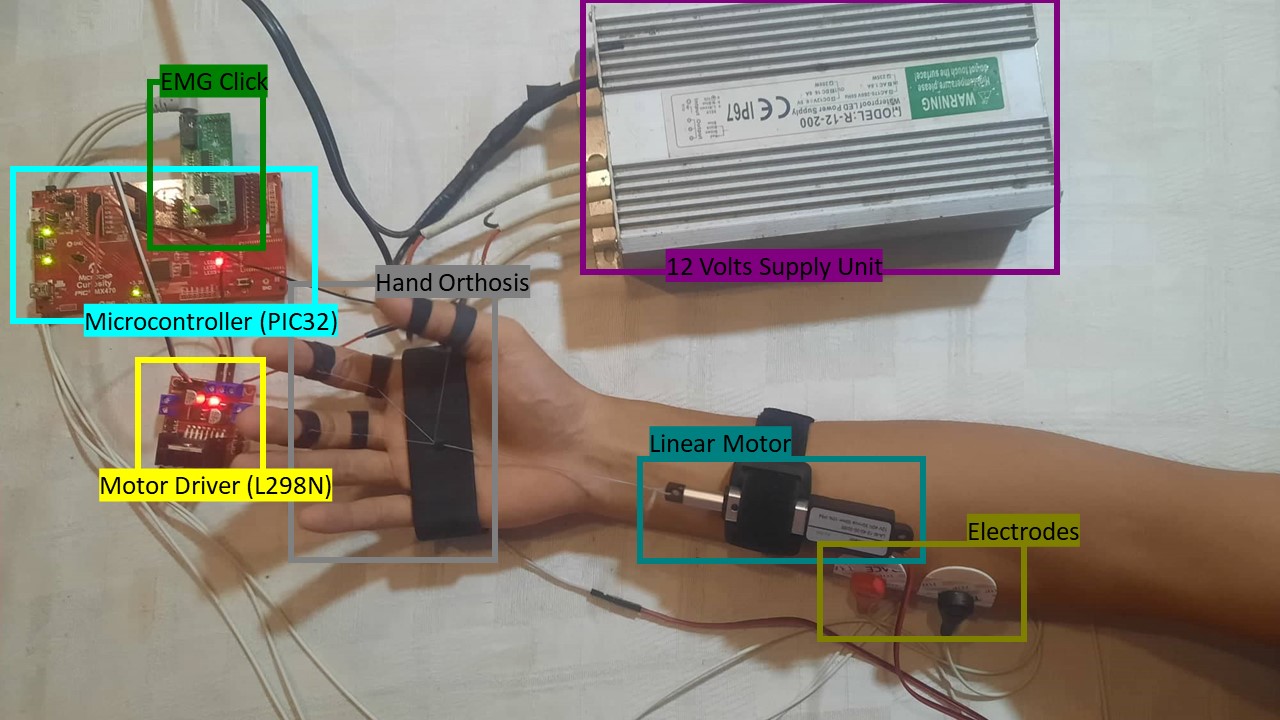
Fate, however, would intervene. Amidst the endless research possibilities a young electronics engineer could engage in, Bacani found his way to Dr. Manuel Ramos Jr.’s Robotics and Automation Laboratory. Under Ramos’ tutelage and mostly from home, Bacani would create the proof of concept in his bid for control system mastery: a low-cost, myoelectric hand orthosis prototype.